计算管线
计算管线(ComputePipeline)是 WebGPU 中控制计算着色器(Compute Shader)阶段的管线。
计算管线适用于各种 GPU 通用计算场景,这是 WebGL 所不具备的。我们通过绑定的存储缓冲区(Storage Buffer)及存储纹理(Storage Texture)来获得计算输出。
创建一个计算管线
计算管线的创建相比于渲染管线简单得多,甚至我们都不需要显式创建并指定绑定组布局(BindGroupLayout):
let compute_shader = device.create_shader_module(...);
let compute_pipeline = device
.create_compute_pipeline(&wgpu::ComputePipelineDescriptor {
layout: None, // 此处使用了隐式布局
module: &compute_shader,
entry_point: Some("cs_main"),
compilation_options: Default::default(),
label: None,
});使用隐式绑定组布局有一个小小的局限:绑定的每个资源必须在入口点(Entry Point)中有被访问到。如果有没被访问的绑定资源,就必须显式指定布局。
使用存储缓冲区与存储纹理
存储缓冲区与存储纹理都是 WGSL 中的资源类型。
而我们在 wgpu 中创建及绑定它们时,与其它缓冲区及纹理的创建是一样的,只需要在 usage 字段中标记出用途:
let buf = device.create_buffer_init(&wgpu::util::BufferInitDescriptor {
// ...
// VERTEX | STORAGE 表示此缓冲区可以做为顶点缓冲区以及存储缓冲区来使用
usage: BufferUsages::VERTEX | BufferUsages::STORAGE,
});
let tex = app.device.create_texture(&wgpu::TextureDescriptor {
// ...
// TEXTURE_BINDING | STORAGE_BINDING 表示此纹理可以做为采样纹理以及存储纹理来使用
usage: TextureUsages::TEXTURE_BINDING | TextureUsages::STORAGE_BINDING,
});在 WGSL 中,存储缓冲区与存储纹理有一些使用上的区别:
- 存储缓冲区:默认访问模式是只读,可以通过
read_write声明为可读可写, 读写操作类似于数组的访问与赋值; - 存储纹理:默认访问模式是只写,而且在 Web 端只能用只写模式,在 Native 端我们可以使用
TEXTURE_ADAPTER_SPECIFIC_FORMAT_FEATURESfeature 来打开可读可写的访问模式。还有,存储纹理必须明确声明纹素的格式,且不支持带Srgb后缀的格式。从这里可以查阅到所有受支持的格式: WGSL 标准:存储纹素格式
struct Particle {
pos : vec2f,
vel : vec2f,
};
// 存储缓冲区
@group(0) @binding(0) var<storage, read_write> particles: array<Particle>;
@group(0) @binding(1) var from_tex: texture_2d<f32>;
// 存储纹理
@group(0) @binding(2) var to_tex: texture_storage_2d<rgba8unorm, write>;
@compute @workgroup_size(16, 16)
fn cs_main(@builtin(global_invocation_id) global_id: vec3<u32>) {
let uv = vec2<i32>(global_id.xy);
// 读取存储缓冲区
let particle = particles[vu.x * uv.y];
var texel: vec4f;
// ...
// 写入纹素数据到存储纹理
textureStore(to_tex, uv, texel);
}计算通道
与创建渲染通道类似,我们需要使用 encoder 来创建计算通道(ComputePass),然后用计算通道来编码所有的计算命令:
// let encoder = ...
{
let mut cpass = encoder.begin_compute_pass(&ComputePassDescriptor::default());
cpass.set_pipeline(&self.compute_pipeline);
cpass.set_bind_group(0, &self.bind_group, &[]);
cpass.dispatch_workgroups(self.workgroup_count.0, self.workgroup_count.1, 1);
}
queue.submit(Some(encoder.finish()));在展示平面章节已讲解过 {} 开辟块空间的用途,这里就不再赘述。
dispatch_workgroups() 就是调度计算任务的命令,接受 3 个 u32 类型的值做为参数。这些参数具体是什么意思呢?那就要说到计算管线里最重要的一个概念了:
工作组
GPU 通过同时运行大量线程来实现并行处理的能力,而工作组(Workgroup)就是用于指定 GPU 如何组织这些线程。
一个工作组实质上就是一组调用,同一工作组中的线程同时分别执行一个计算着色器实例,并共享对工作组地址空间中着色器变量的访问。计算着色器通常被设计成线程相互独立运行,但线程在其工作组上进行协作也很常见。
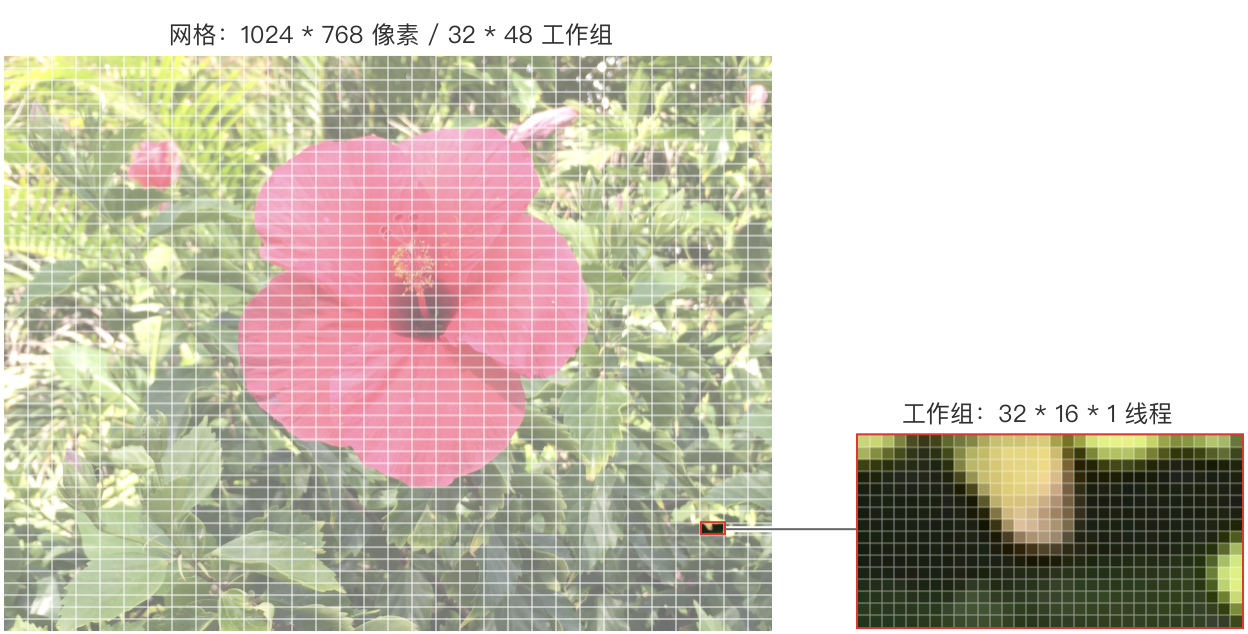
可以将工作组理解为一个三维网格,网格中的每个点就代表一个线程。在图像处理中,网格通常是一个二维的线程矩阵(二维就是其中一个维度为 1 的特殊三维形式),代表整个图像,每个线程对应于正在处理的图像的一个像素。
我们通过(x, y, z)三个维度来声明计算着色器的工作组大小,每个维度上的默认值都是 1:
@workgroup_size(32, 16) // x = 32, y = 16, z = 1下图显示了正在被着色器处理的图像如何被划分为工作组,以及每个工作组是如何由单个线程组成:
那么,线程与工作组在计算着色器网格中的位置是如何被标识的呢?
内建输入量
WGSL 计算着色器有 5 个内建输入量(Buit-in Input Values)用于标识当前线程及工作组:
global_invocation_id:当前线程在计算着色器网格中的全局三维坐标;local_invocation_id:当前线程在所处的工作组中的局部三维坐标;local_invocation_index:当前线程在所处的工作组中的线性化索引;workgroup_id:当前工作组在工作组网格中的三维坐标;num_workgroups:当前调度(dispatch)的工作组维度量;
最常用的是前三个内建输入量。
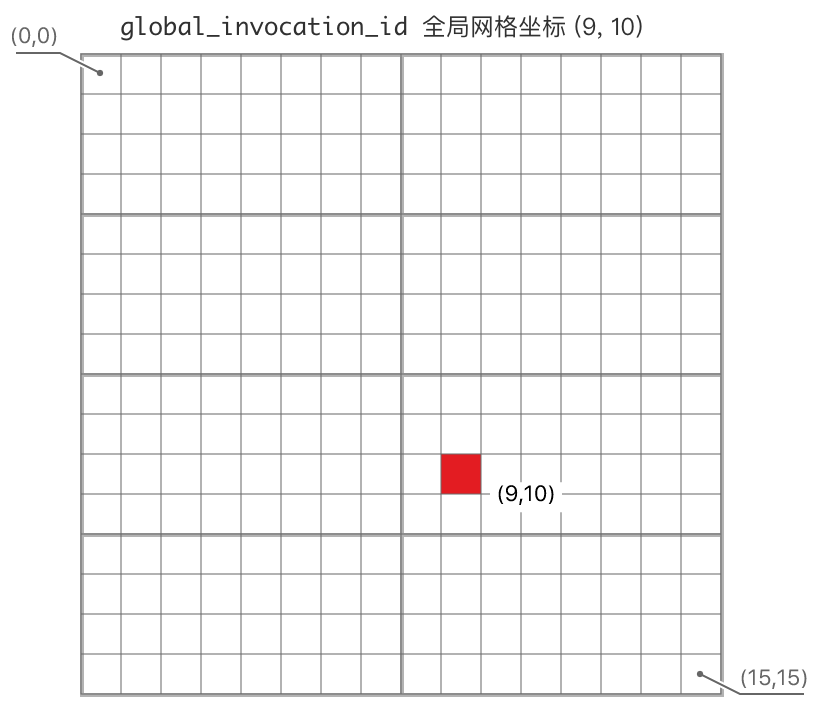
例如,给定一个由 16 * 16 * 1 个线程组成的网格,将其划分为 2 * 4 * 1 个工作组,8 * 4 * 1 个线程。 那么:
- 一个线程在网格中的
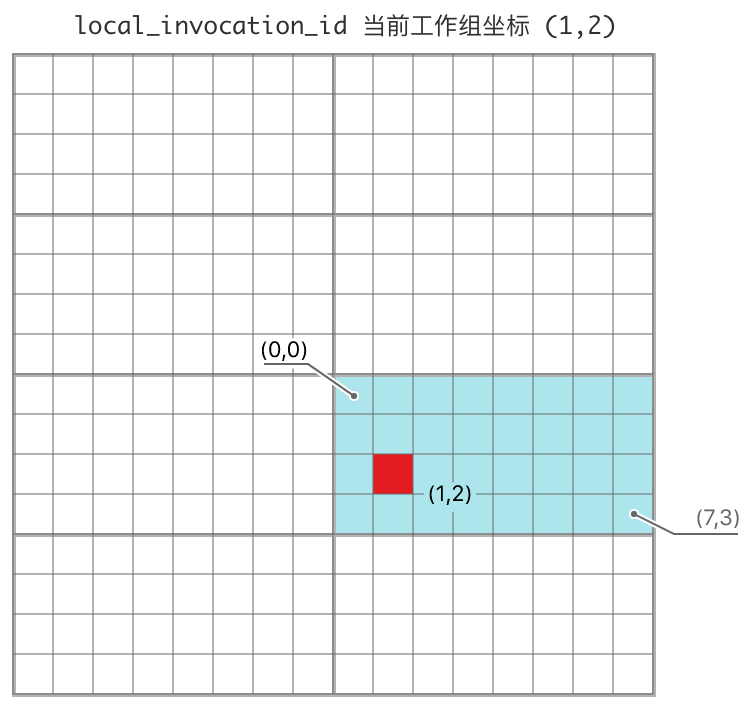
global_invocation_id全局三维坐标是(9, 10)(左图); - 此线程在所处工作组中的
local_invocation_id局部三维坐标是(1, 2),local_invocation_index线性化索引是17(右图); - 所处工作组在工作组网格中的
workgroup_id三维坐标就是(1, 2)(右图的蓝绿色块):
这些内建输入量在着色器中具体如何使用呢?下边的着色器中演示了如何直接通过 global_invocation_id 来获取纹素的坐标:
struct UniformParams {
img_size: vec2<i32>,
uv_offset: vec2<i32>,
};
@group(0) @binding(0) var<uniform> params: UniformParams;
@group(0) @binding(1) var from_tex: texture_2d<f32>;
@compute @workgroup_size(16, 16)
fn cs_main(@builtin(global_invocation_id) global_id: vec3<u32>) {
// 纹素(图片的像素)坐标
let uv = vec2<i32>(global_id.xy);
// 判断当前坐标是否超出了纹素坐标范围
if (uv.x >= params.img_size.x || uv.y >= params.img_size.y) {
return;
}
// 从纹理图像中读取纹素
var texel = textureLoad(from_tex, uv, 0)
// ...
}使用计算着色器需要注意避免坐标越界问题,因为通常纹理图像的分辨率与我们的工作组大小不是整除关系。
确定工作组大小与数量
工作组的最佳大小(指 x, y, z 三个维度的大小)并没有固定的值,需要结合实际使用场景来确定,而且能支持的最大值还与目标硬件有关。
我们从 adapter.limits() 里,能获取到当前设备支持的最大工作组大小 (maxComputeWorkgroupSizeX,maxComputeWorkgroupSizeY,maxComputeWorkgroupSizeZ),它们的默认值分别为 (256, 256, 64)。
这三个维度的最大值容易让人误解,以为可以在计算着色器中设置 @workgroup_size(256, 256, 64)。
事实上 WebGPU spec 的验证规则是:x * y * z <= max(x, max(y, z)), 也就是说,设置的 @workgroup_size 三个维度的乘积不能大于 maxComputeWorkgroupSizeX,Y,Z 三个维度中的最大值。
通常,当只需要在计算着色器中操作存储缓冲区时,使用一维工作组 @workgroup_size(x) 是合适的, y、z 维度保持默认值 1; 当需要操作纹理,使用二维或三维工作组 @workgroup_size(x,y) 会更便利。
现在我们可以来回答开头的问题了:
cpass.dispatch_workgroups(workgroup_count.0, workgroup_count.1, workgroup_count.2);上面计算通道的调度命令接收的参数具体是什么意思呢?
它们就是工作组网格的 3 个维度量。
以 1000 * 768 个线程组成的网格为例,假设工作组大小为@workgroup_size(32,16),那么:
// 计算维度值并向上取整
workgroup_count = ((1000 + (32 -1)) / 32, (768 + (16 -1)) / 16, 1);CPU 端读取计算管线输出
在案例展示/离屏渲染章节已讲解过如何从缓冲区中读取数据,存储纹理的读取也是一样的,这里不再赘述。
实战:实现高斯模糊
要掌握 WebGPU 计算管线,核心内容就是上边讲解的 “使用存储缓冲区与存储纹理” 及 “工作组”,某个具体实现的着色器逻辑代码并不重要,因为它们与顶点及片元着色器代码没有太大的区别。
点击下方的查看源码就能看到所有实现代码。如对图片模糊算法的细节感兴趣,可以查看这里
运行示例代码
此示例可在桌面端及 Chrome / Edge 113+、Arc、Safari 26、Firefox Nightly、Safari Technology Preview 浏览器中运行(如何开启浏览器 WebGPU 功能支持)